Understanding the TeleXperience System
If you want to integrate TeleXperience with your own robot and handle the adaptation yourself, please refer to the information in this section.
Advanced development is not covered by official after-sales support. You are responsible for resolving any issues encountered during the adaptation process. You may submit a support form, and we will try to provide suggestions, but we cannot guarantee response times or specific solutions.
If you encounter issues you cannot resolve, please contact your sales representative to purchase adaptation services. Our professional team can provide customized support to ensure your robot is successfully integrated.
Please note the following current limitations for self-adaptation:
- Dexterous hand: Independent finger movement is not supported; only simultaneous opening and closing of all fingers is available.
- Robot model visualization and real-time motion sync in the VR app are not supported.
Network Topology
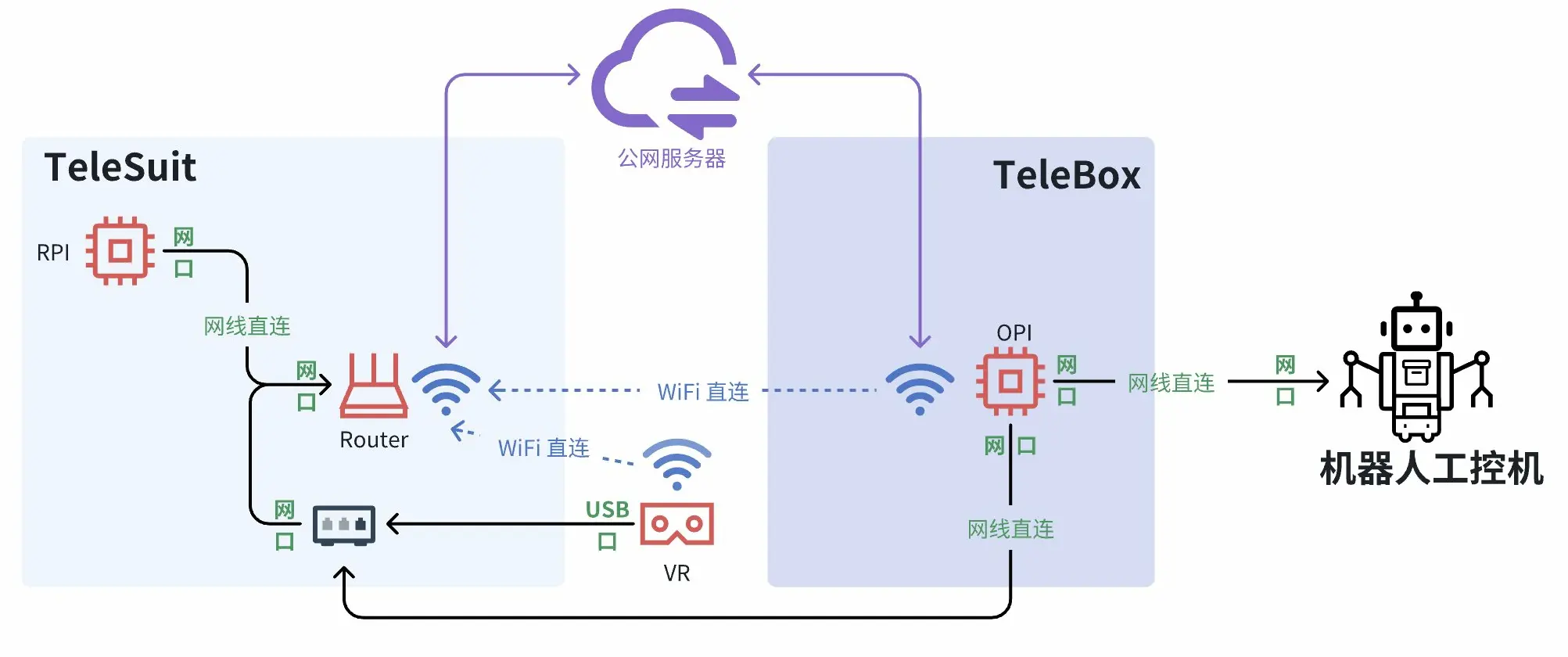
There are three ways to establish communication between the TeleSuit and TeleBox:
- Direct wired connection
- Direct Wi-Fi connection
- Via a public server for remote teleoperation across networks (coming soon)
For communication between the TeleSuit and VR:
- Direct Wi-Fi connection
- Direct wired connection (Pro version and above)
ROS Topic List
TeleXperience uses several ROS2 topics. You can subscribe to these topics for further development.
| Topic | Message Type | Description |
|---|---|---|
/io_teleop/joint_states | sensor_msgs/JointState | Joint position feedback from the robot controller |
/io_teleop/target_ee_poses | geometry_msgs/PoseArray | Desired end-effector poses for the robot arm |
/io_teleop/joint_cmd | sensor_msgs/JointState | Target joint positions for the robot arm (waist) |
/io_teleop/target_gripper_status | sensor_msgs/JointState | Desired gripper open/close state |
/io_teleop/target_base_move | std_msgs/Float64MultiArray | Desired chassis movement speed |
/io_teleop/target_finger_joints | sensor_msgs/JointState | Target finger joint angles for the dexterous hand |
/io_teleop/target_joint_from_vr | sensor_msgs/JointState | Target joint positions for head and torso lift |
/io_teleop/target_joint_from_mocap | sensor_msgs/JointState | Joint angle optimization reference from mocap |
/io_teleop/vibration_feedback | std_msgs/Float64MultiArray | Haptic feedback for controllers |
/io_teleop/vr_data | io_msgs2/VrData | VR headset and controller data |
/mocap/sensor_data | io_msgs2/SquashedMocapData | Motion capture information |
/io_fusion/tf | tf2_msgs/TFMessage | TF calculated from mocap data |
The io_msgs2 message types are custom-defined. You can access the source files as follows:
ssh orangepi@10.42.0.3 # password:123456
cd /teleopbox_app/ros_ws/src/io_msgs2